Lapras 2.0
Our latest development
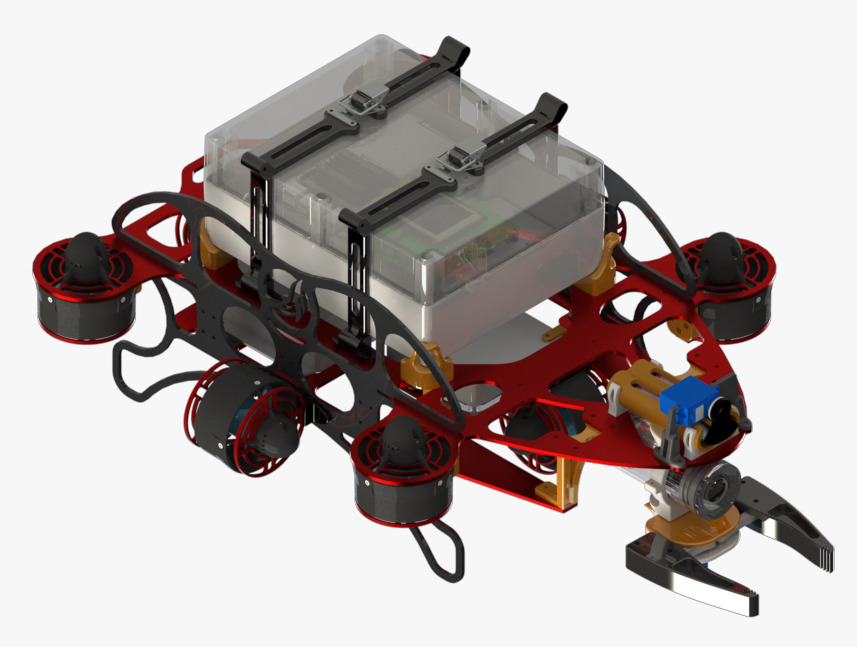
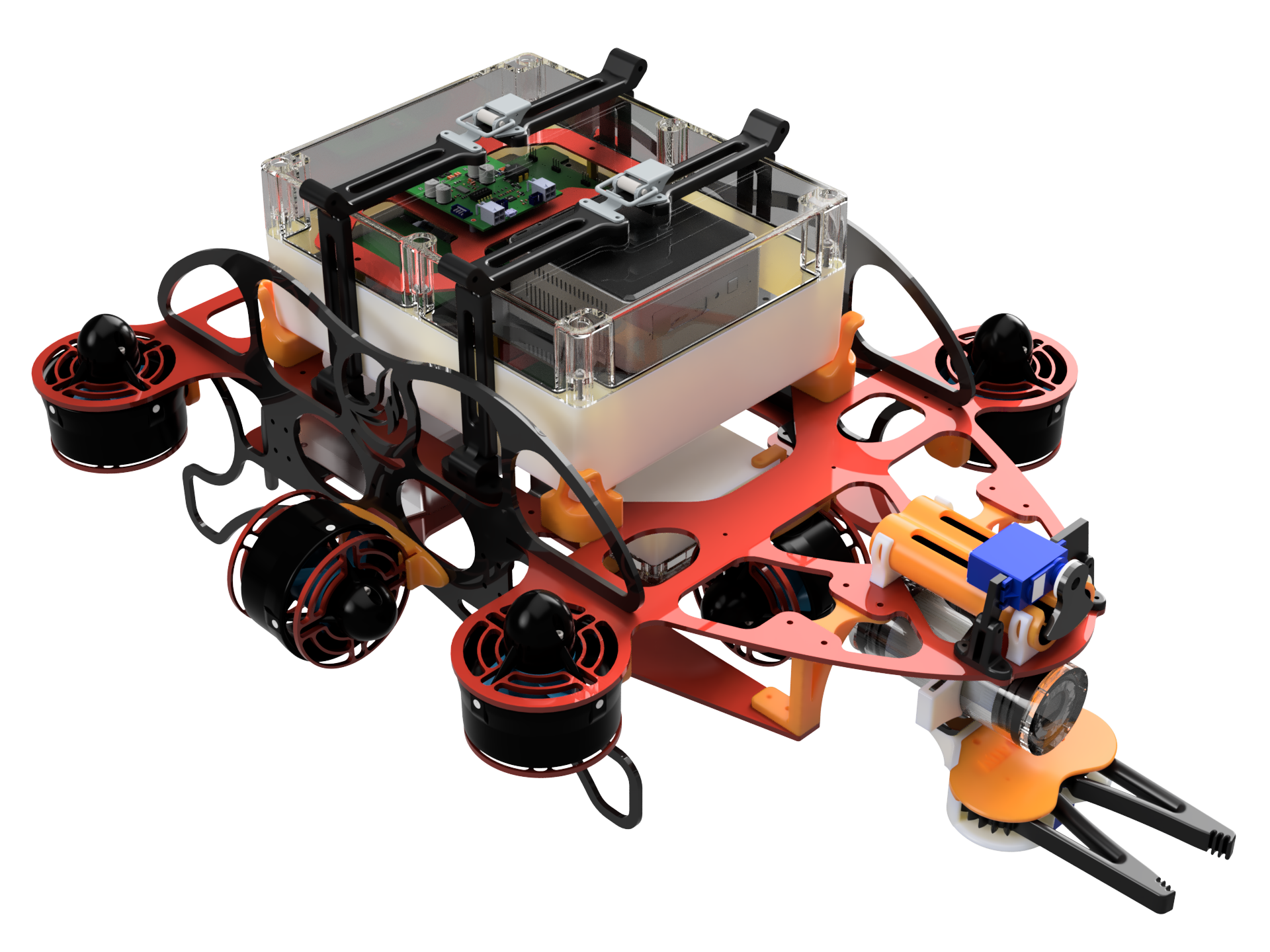
CAD Rendering of the Vehicle
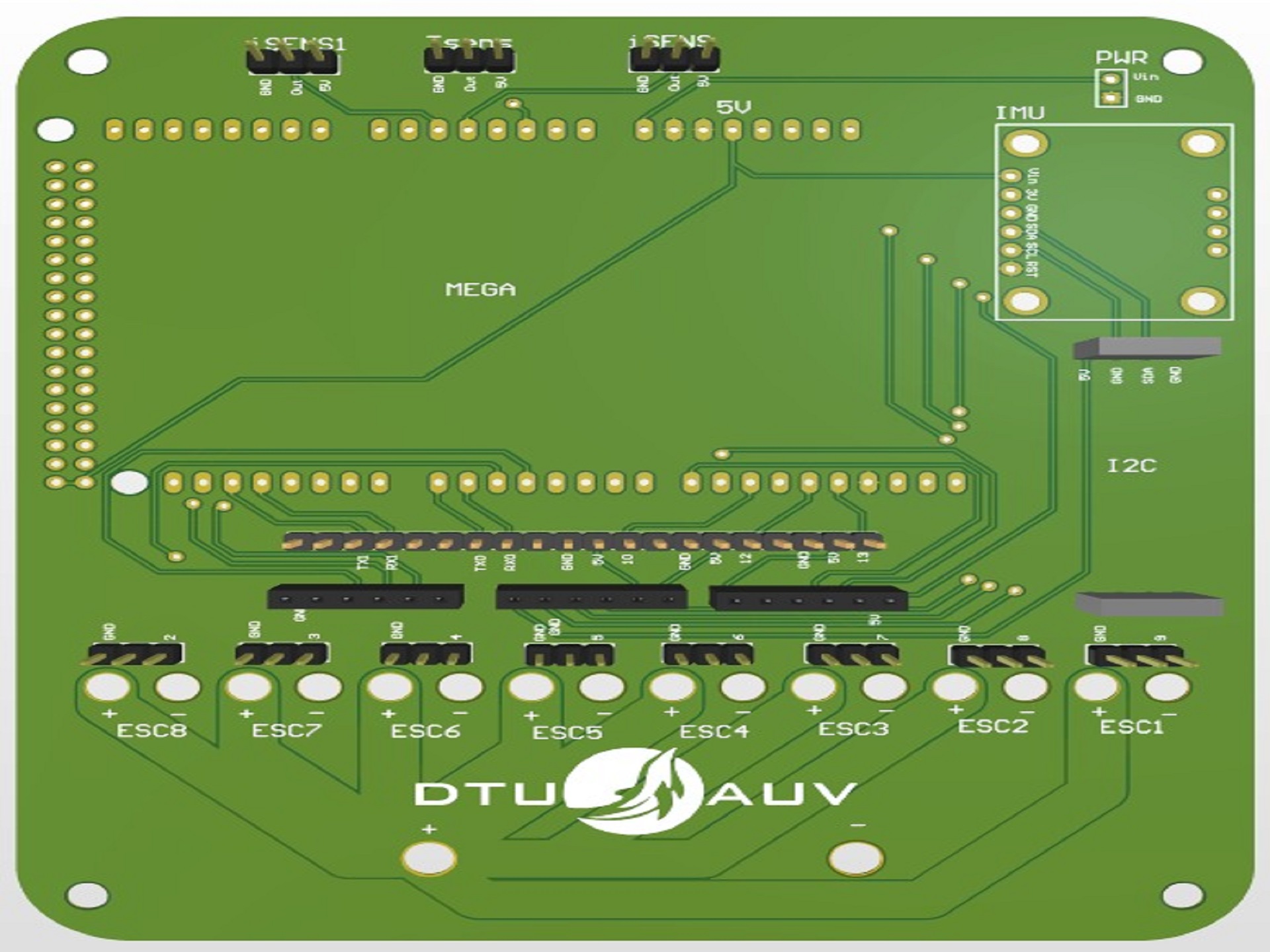
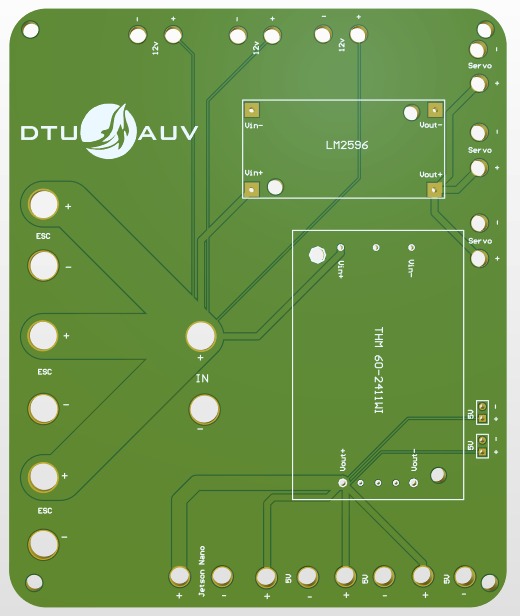
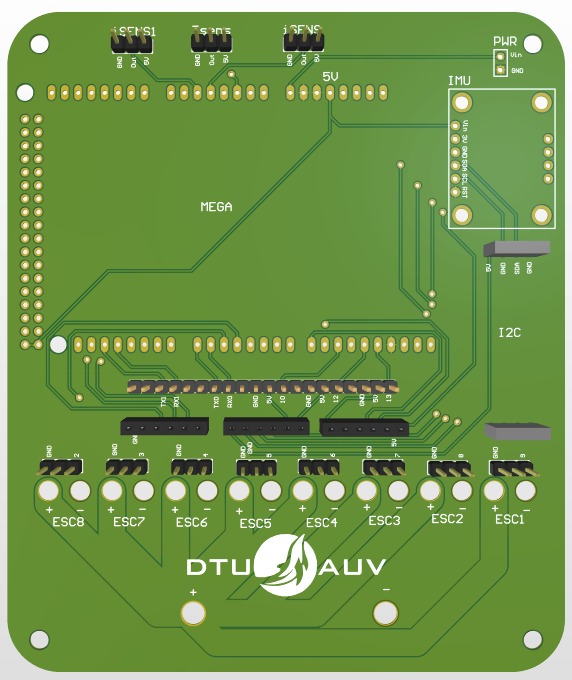
CAD Rendering of the PCB
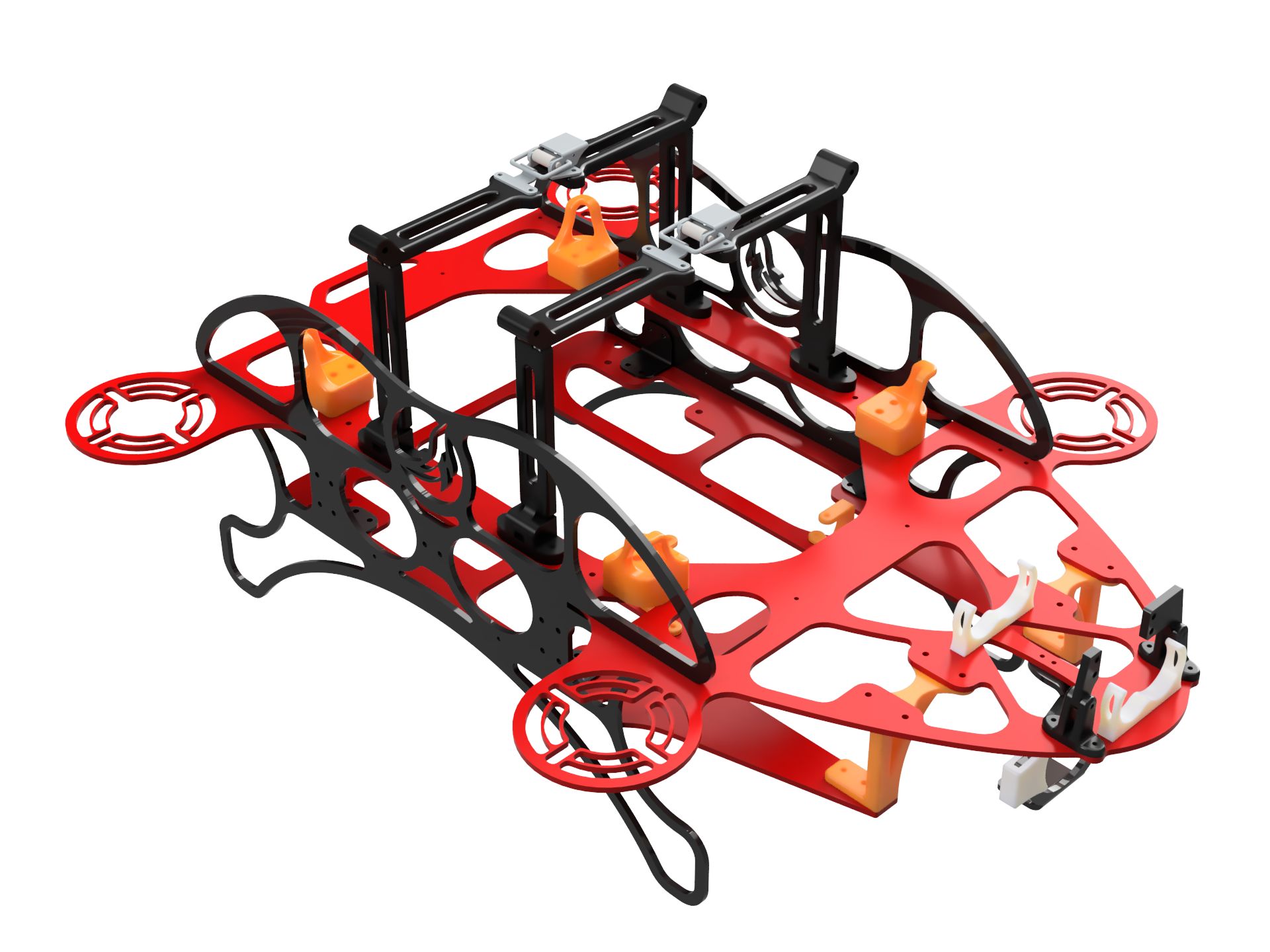
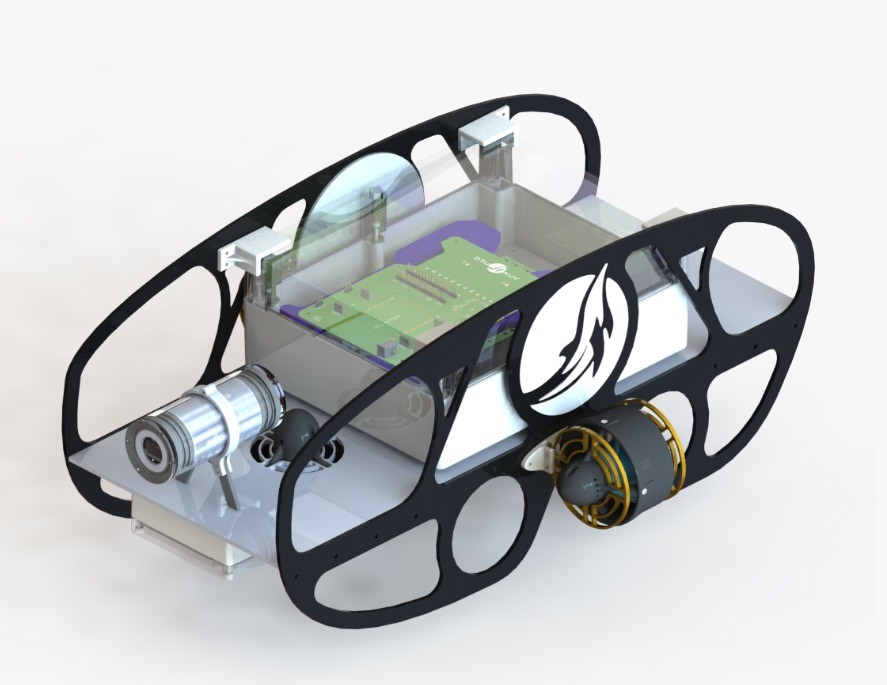
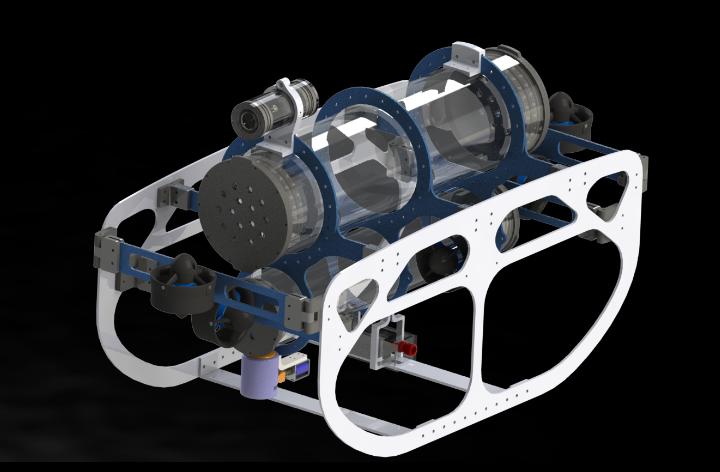
CAD Rendering of the Frame
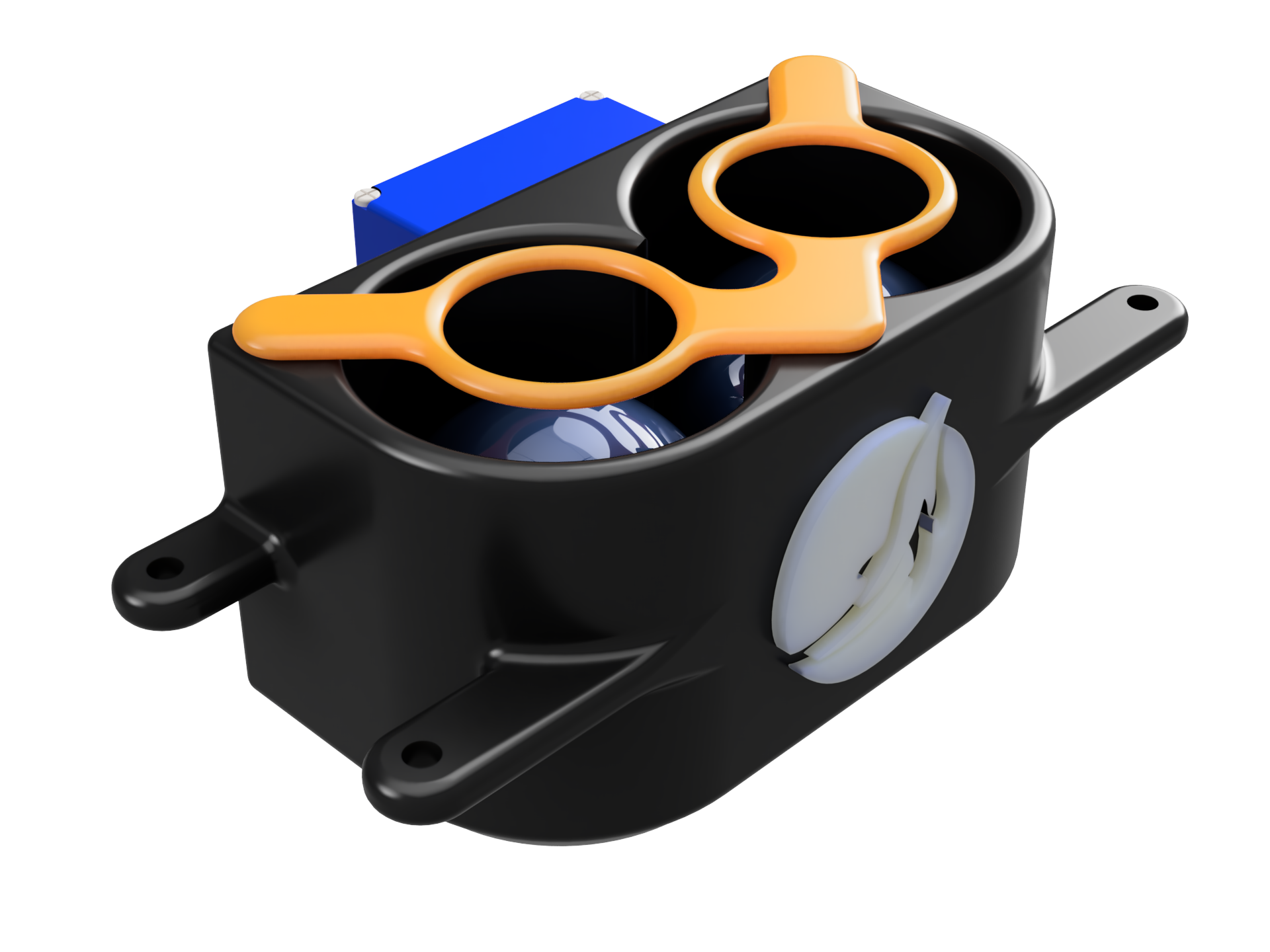
Design of the Dropper System
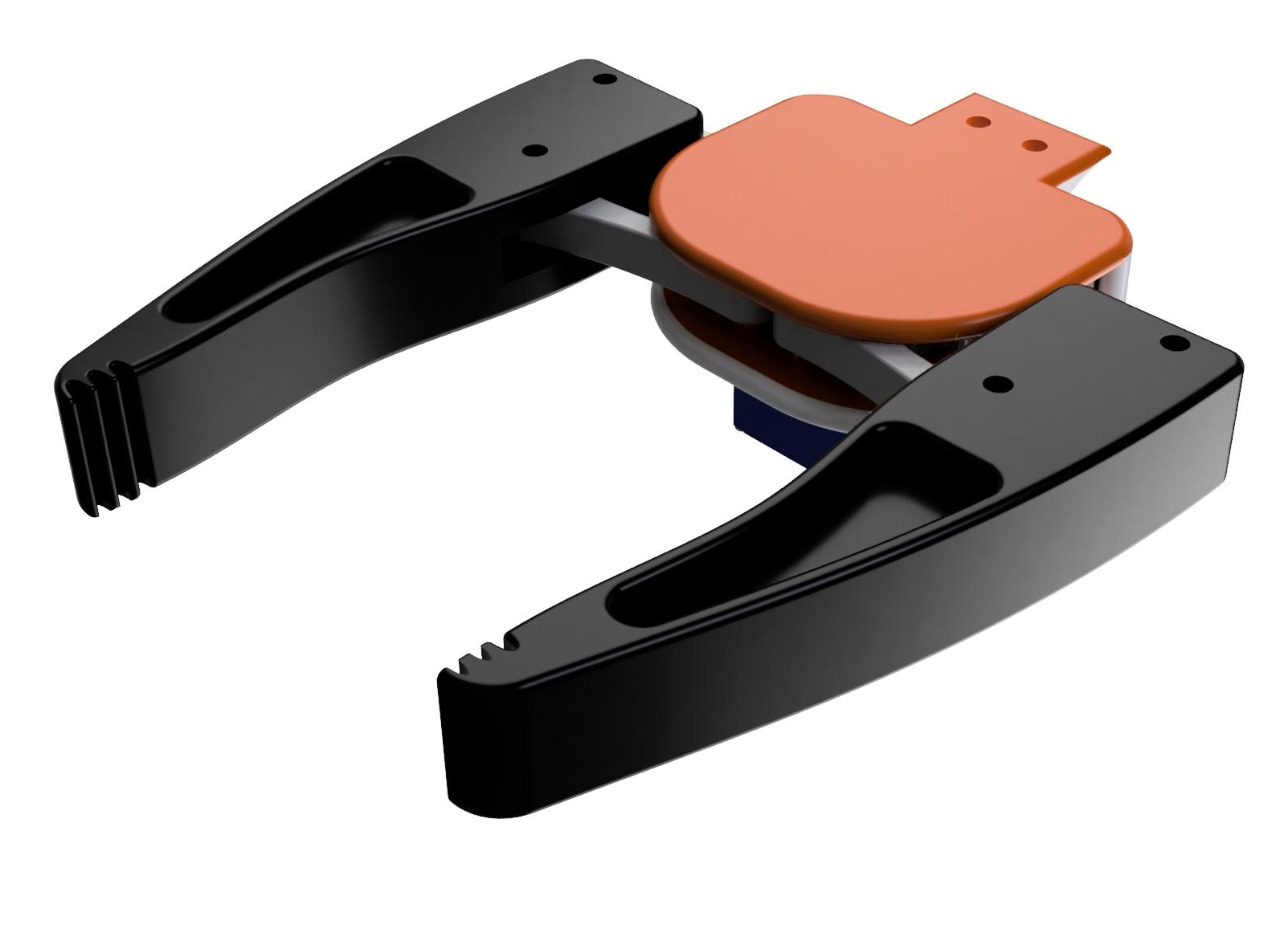
Rendering of the Gripper System
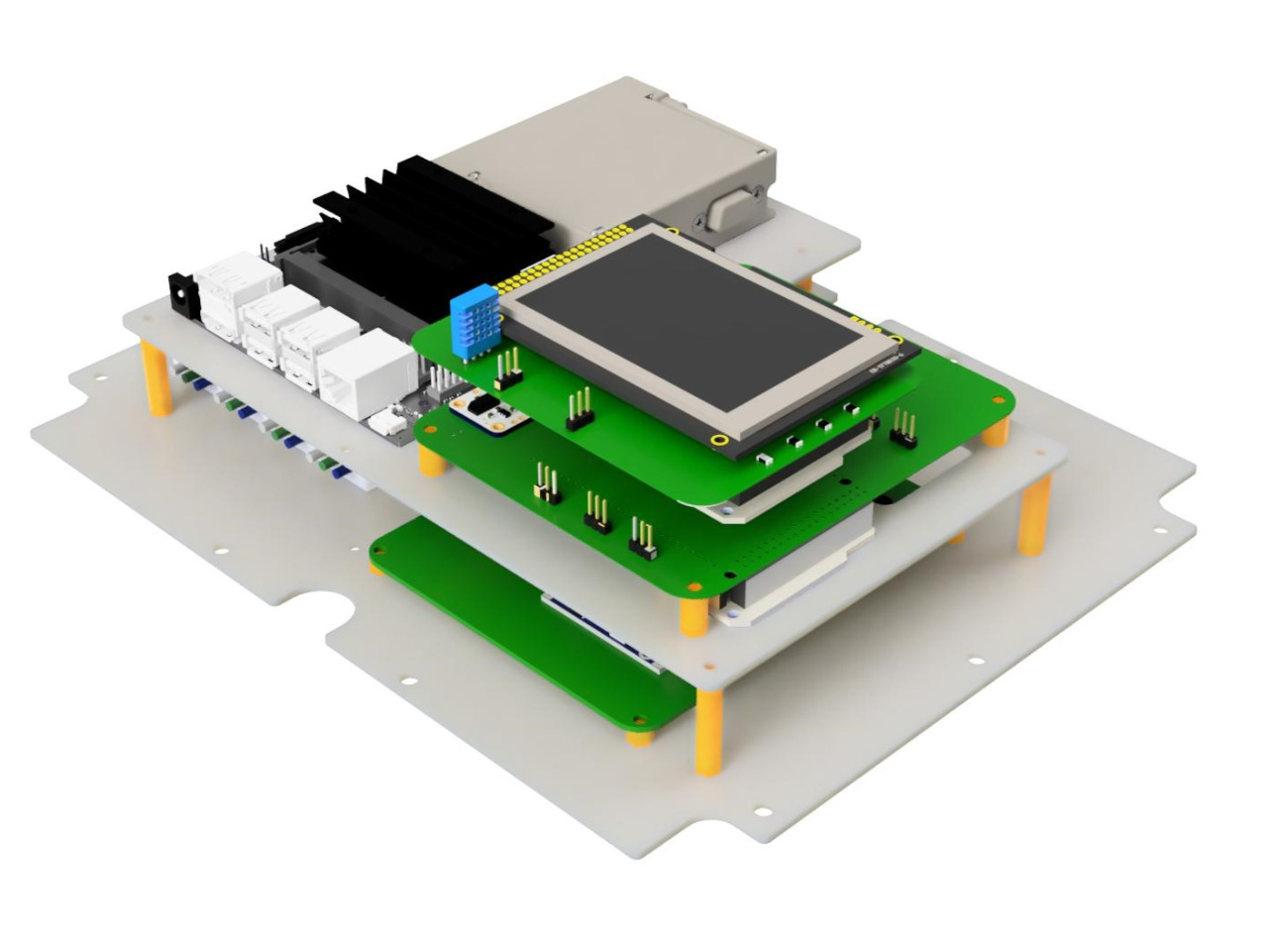
E-Tray design of the vehicle
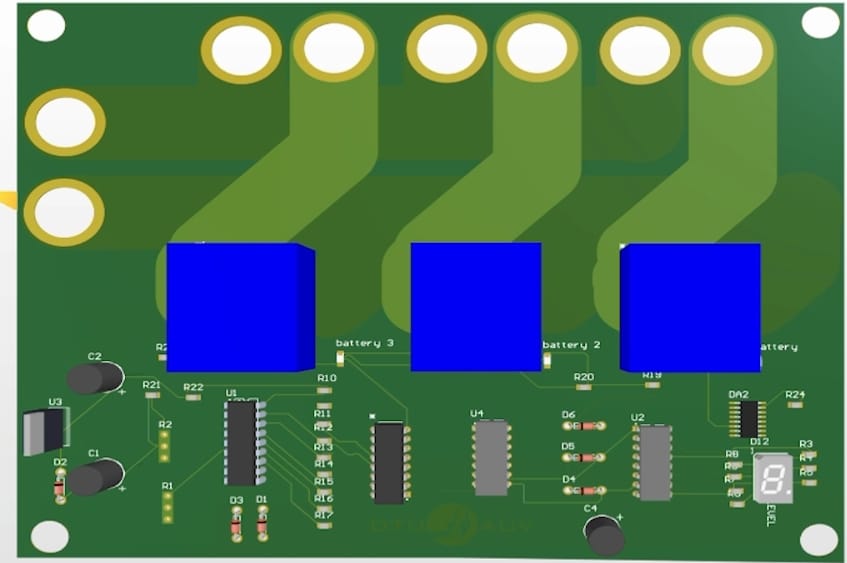
Battery Management System Design
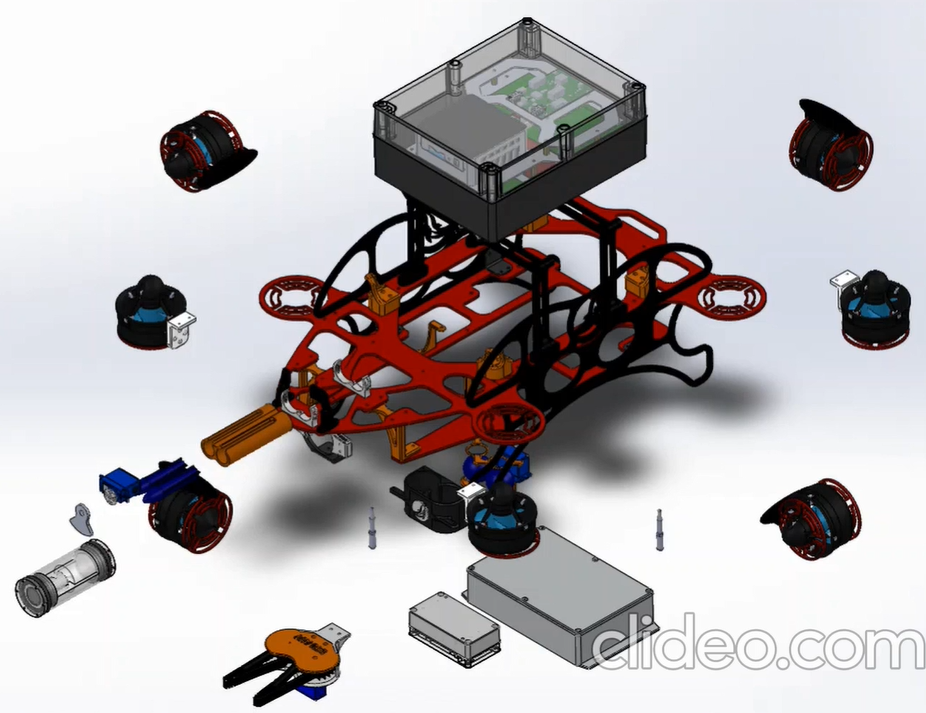
Collapsed view of the Bot
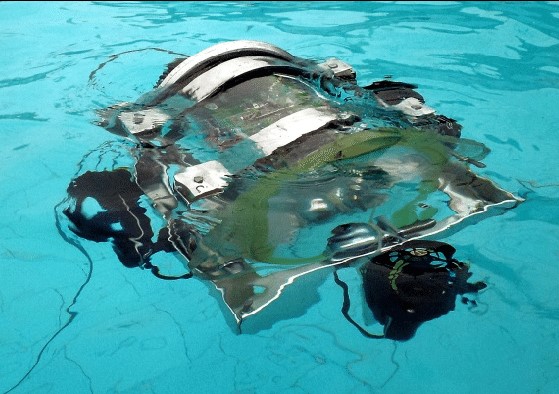
Our latest Autonomous Underwater Vehicle, prepared for the RoboSub
2022 competition. LAPRAS is the flagship Autonomous Underwater Vehicle developed at Delhi Technological University.Using the insights from Robosub 2021 , Lapras 2.0 has enhanced upon the capabilities of its predecessor. Manipulators have been upgraded for better dynamics in autonomous operations.Vision algorithms have been finely tuned which has led to a massive improvement in the success rate of object detection.
Lapras 2.0 Journal